Company
The 5 Safety Rules of RSS
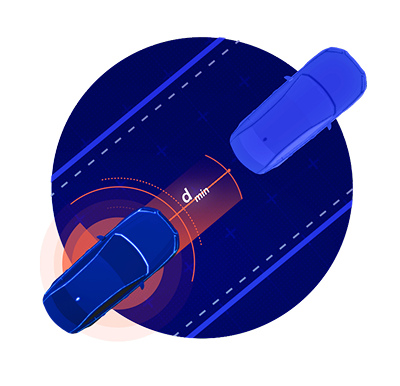
Don’t hit the car in front of you
Based on common laws of physics and a century of driving experience, new human drivers are taught to leave enough space between themselves and the car in front of them in order to provide enough time to react if the car in front were to suddenly brake. The 'Two Second Rule' is an intuitive way for any human driver to leave a safe distance without needing to calculate the velocities of both cars, the driver’s reaction time, and the front vehicle’s braking capability.
The AV, on the other hand, can be programmed to create and operate within a safe following distance, based on the formula below.

The moment the distance between the two cars is less than dmin, the AV brakes until a safe following distance is restored, or until the vehicle comes to a complete stop, whichever occurs first.
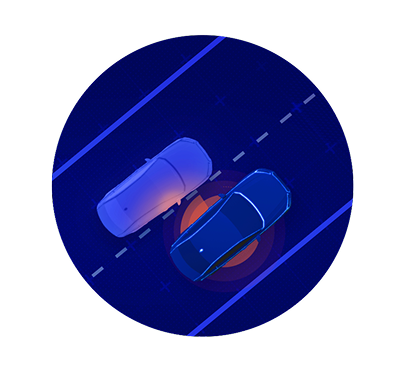
Don’t cut in recklessly
The safest human drivers do well to stay in their designated lane and avoid unsafe cut-ins when merging into other lanes. Rule 2 of RSS formalizes a safe lateral distance, ensuring the AV can identify when lateral safety may be compromised by a driver unsafely crossing into its lane.
Humans naturally drift as they drive. Instinctively, a human driver will brake slightly to retain safe longitudinal distance from the car unsafely cutting into the lane. If it seems imminent that the lack of sufficient lateral distance will cause a crash, the driver will also steer away from the oncoming car. The formula below formalizes these rules regarding safe distance.

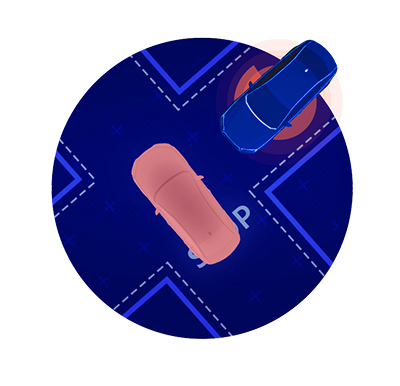
Right of way is given, not taken
Lane lines, traffic signs, and traffic lights establish priority for routes as they intersect one another. Under normal circumstances, human drivers trust others to obey the rules of road when it comes to right of way at intersections.
However, there are times when other drivers violate the right of way, and humans instinctively know that they must forfeit their right of way to avoid an accident. For AVs, this decision must be formalized so that the AV can protect itself against human drivers that do not properly adhere to the right of way rules. While the AV may have the right of way according to the rules of the road, it should not allow a crash to happen just because others violate those principles.
Be cautious in areas with limited visibility
Many factors can affect visibility while driving. Aside from the weather, factors such as road topography, buildings, and other cars can obstruct our view of the road and other road users. Depending on the surroundings, humans naturally put bounds on their behavior to avoid unforeseen danger. In a crowded school drop-off zone, for example, humans instinctively drive extra cautiously, as children can act unpredictably, unaware that the vehicles around have limited visibility.
For the AV to safely traverse the roads with humans, AV's will have to make similar assumptions and exhibit caution in areas of occlusion to ensure safety for all.
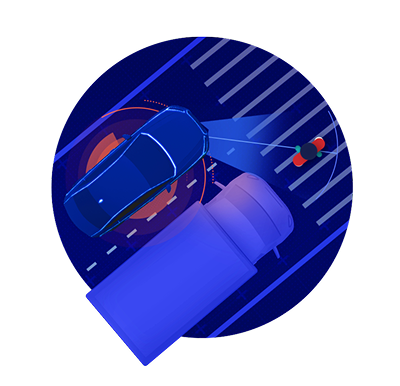
If you can avoid a crash without causing another one, you must
Rules 1-4 create formal definitions to identify what a dangerous situation is and what the AV's proper response is. Rule 5 covers scenarios where a dangerous situation may have been imposed so suddenly that a collision cannot be avoided unless the AV violates one or more rules of the road.
For example, if an object suddenly appears in the AV's direct path, the AV must avert a crash by veering into the next lane, provided it would not cause a different collision. Even though this evasive action would violate certain rules regarding lane lines or shoulders, etc., the AV's utmost priority must be to avoid a crash, if it can do so without causing another.

The 5 Safety Rules of RSS
Don’t hit the car in front of you
Based on common laws of physics and a century of driving experience, new human drivers are taught to leave enough space between themselves and the car in front of them in order to provide enough time to react if the car in front were to suddenly brake. The 'Two Second Rule' is an intuitive way for any human driver to leave a safe distance without needing to calculate the velocities of both cars, the driver’s reaction time, and the front vehicle’s braking capability.
The AV, on the other hand, can be programmed to create and operate within a safe following distance, based on the formula below.
The moment the distance between the two cars is less than dmin, the AV brakes until a safe following distance is restored, or until the vehicle comes to a complete stop, whichever occurs first.

Oct 29, 2017
Prof. Shashua at World Knowledge Forum: Platform for Safe & Scalable AVs
Oct 25, 2018
Professor Shai Shalev-Shwartz on Formalizing the 'Duty of Care' for Self-Driving Cars
Mar 4, 2020
Responsibility-Sensitive Safety – Jack Weast's Mobileye D.R.I.V.E.S. Presentation
Jan 6, 2020
Responsibility-Sensitive Safety in Action
The RSS Concept
On a Formal Model of Safe and Scalable Self-driving Cars
Academic Paper
Vision Zero: Can Roadway Accidents be Eliminated without Compromising Traffic Throughput?
Academic Paper
Towards Standardization of AV Safety: C++ Library for Responsibility Sensitive Safety
Academic Paper
Safety First for Automated Driving
Whitepaper
Digitizing the Social Contract for Safer Roads
Editorial
Innovation Requires Originality
Editorial
Implementing the RSS Model on NHTSA Pre-Crash Scenarios
Whitepaper
Paving the Way Toward Safer Roads for All
Editorial
Experience Counts, Particularly in Safety-Critical Areas
Editorial
From the News
Worldwide Standardization of RSS
The Institute of Electrical and Electronics Engineers (IEEE): IEEE 2846 (forthcoming)
Approved a proposal to develop a standard for safety considerations in AV decision-making, and participation in the workgroup is open to companies across the AV industry.
China ITS Industry Alliance: Technical Requirement of Safety Assurance of AV Decision Making (0116-2019)
The standards body for the world’s largest passenger vehicle market, has approved a 1.0 standard that uses RSS as the basis to define the basic principles of planning safety including minimum safe distance, dangerous situation, and proper response.
ISO 4804: Safety First for Automated Driving
Safety by design and verification and validation (V&V) methods of SAE L3 and L4 automated driving
ISO 21448: Safety Of The Intended Functionality
Guidance on the applicable design, verification and validation measures needed to achieve the Safety Of The Intended Functionality (SOTIF)




